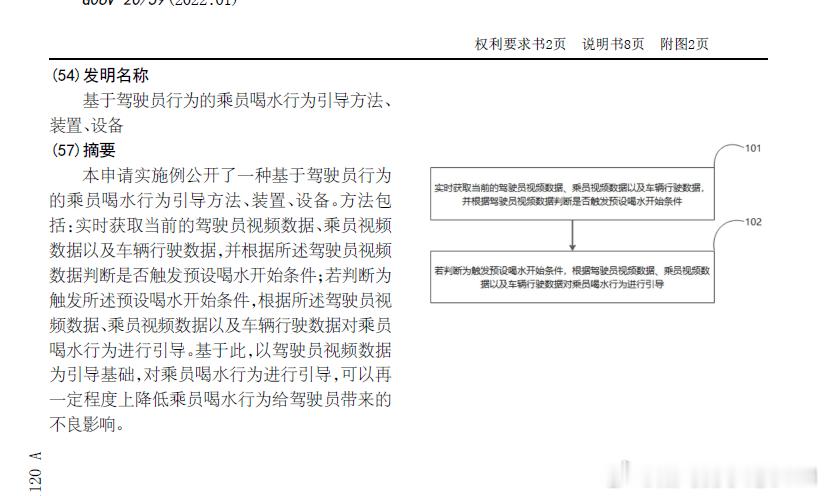
技术巡猎 一汽 写个好玩的---基于驾驶员行为的乘员喝水行为引导方法、装置、设备,看名字就知道是啥了,先不要发表意见哈哈哈。我们就事论事,聊一聊。车里谁没见过这种场景?你在开车的时候,副驾抬头喝水、举瓶子、手在你中控前面晃一下,你的余光会本能去追一下。直线巡航还好,一旦遇到并线、看后视镜、进匝道这种“注意力本来比较紧张”的时刻,是有点情况的---现在座舱监测大多只盯着驾驶员,但其实乘员行为造成的风险,可能是会被漏判的。
这个专利的做法,首先判断“现在是不是一个适合副驾喝水的窗口”,再去做“怎么喝不容易干扰驾驶员”的引导,有点奇怪?来瞧瞧。
怎么判断驾驶员的稳定性呢?专利给了两把尺子,视线+双手。座舱区域被划成15个注视区域,目标区域设为区域3,用GazeNet这类注视识别模型输出每个时刻驾驶员在看哪里。它不只看一帧两帧,会用“最近2分钟”做预设时间范围:这两分钟里每个时刻都注视目标区域,才算“持续专注”。同时用YOLOv8检测手和方向盘,判断手框和方向盘框是否重合,从而确认“双手都在盘上”,同样用两分钟窗口做一致性判断。这俩条件同时满足,才触发“允许开始喝水”。
嗯?“副驾喝水”是一个需要许可的动作……且许可依据是驾驶员状态,而不是副驾状态。听起来有点“管得太宽”了,但这里的讨论是纯从风险链路上的思考。
触发以后它怎么引导呢?专利把引导拆成了两块:姿态引导和时间引导。
姿态引导挺有意思:它把喝水当成一个会改变身体遮挡/重心的动作,结合驾驶员头部姿态、方向盘角度、加速度,推荐副驾“左倾/右倾/前倾/后倾”。例子非常具体:驾驶员头偏右或车辆右转,副驾建议左倾;驾驶员头偏左或车辆左转,副驾建议右倾;加速或平稳前进建议前倾;减速或驾驶员分心(比如频繁看后排)建议后倾。
其实是在做一个“遮挡最小化+稳定性”的姿态策略库。
还有“头部姿态联动限幅”。驾驶员用Hopenet这类模型监测Pitch/Yaw,副驾用OpenPose监测头部仰起角度(Pitch)。按驾驶员Yaw分段限制副驾仰角:Yaw30°建议副驾仰角≤10°。并且提示要快---驾驶员Yaw超过阈值后0.5秒内就提醒副驾“驾驶员正在查看右后视镜,请适当降低头部仰起角度”。基本就是把“看后视镜/盲区”这种高敏时刻,直接变成副驾动作的约束条件。
时间引导其实是“喝水倒计时”。它周期性取导航的前方道路数据(转弯、坡度、坑洼、减速带等会影响车姿态的路况)和实时车速,算出到达这些路况的时间,然后和“人体工程学最大允许喝水时间”取最小值作为喝水窗口。
专利里给了个算例:车速60km/h,前方0.15km有转弯,算出来约9秒,于是喝水时间限定9秒;如果前方没障碍且最大喝水时间10秒,就允许10秒。快到时间会催一句“请尽快完成喝水”。
到这一步,其实已经把“副驾喝水”变成一个带时窗、带姿态的受控行为了。但专利还留了兜底:喝水过程中如果判断对驾驶员产生影响,就做终止/纠偏引导。举了一个例子:驾驶员一只手离开方向盘去调空调/导航,这时候副驾如果用同侧手举水瓶,很容易在空间上冲突,既挡视线也挤操作空间。所以它用YOLOv8+OpenPose实时检测驾驶员/乘员手部,把检测框做比例扩展,提前预留“操作占用空间”,再算两者的重叠度;重叠度超过阈值(举例10%-20%)就提示换手,比如“请用左手喝水”。
复杂路况下建议副驾用吸管喝水,核心理由是“动作幅度更小”。判断条件:方向盘转角>30°且5秒内多次转动算频繁操作;横向加速度>0.3g认为转弯或不稳定;导航判断前方100m内有急弯/坑洼/坡道就提前5秒提示;并且状态发生后0.5秒内给出“当前路况复杂,请使用吸管喝水”。
哈哈,大概就这样。咱只管解释这个专利,咱不发表意见。