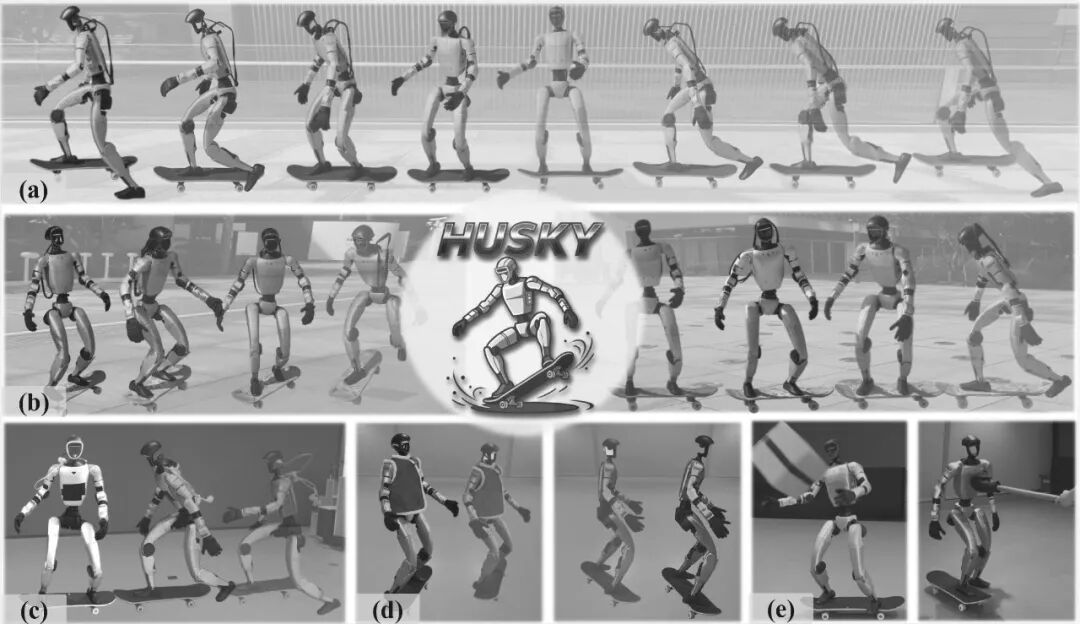
大家可能都看过宇树机器人赛跑,打拳击,参加春晚武术表演了……但最近中国的研究 团队,正在让宇树 Unitree G1 型号的人形机器人,学习滑板。
本文内容来自论文《HUSKY:基于物理感知全身控制的人形机器人滑板系统》,是由 中国电信人工智能研 究院(TeleAI)牵头,和 上海交通大学,中国科学技术大学,上海科技大学,香港大学的研究人员共同合作的项目。 当然,他们的这个项目,不是为了有一天,真的能让机器人去参加奥运比赛,或者在街上完成什么 kickflip to nosegrind。 而是借助滑板工具,训练 人 形机器人的“一 种物理 感知的全身控制框架”,让人形机器人能够在高度动态的平台上稳定运动。 摔过跤的新人滑手都知道,滑板是一个很需要平衡能力的运动。对人形机器人来说,要解决的问题也很多。 研究人员必须把那些滑板初学者会面对的问题数据化,并解决它们。
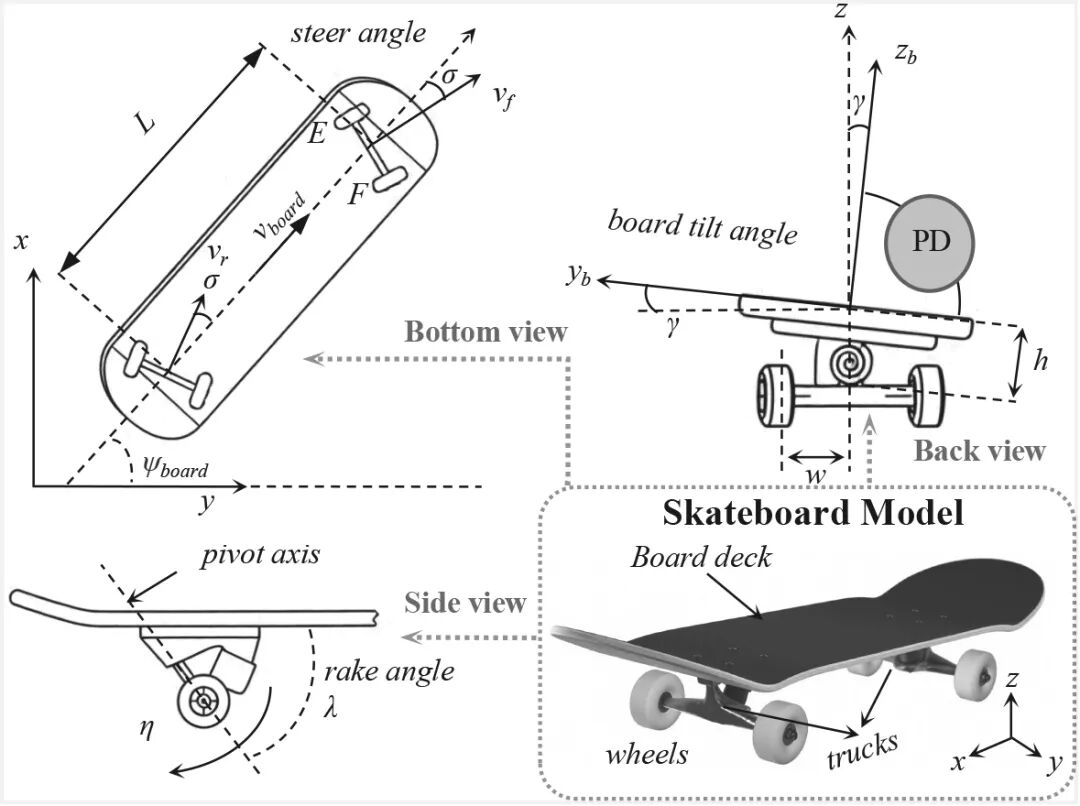
比如滑板是一个完全的移动平台,没有固定的支撑点。在需要转向的时候,为了侧压滑板,重心也要随之变化。 人形机器人和滑板之间的动力学影响和关系,也在这个过程中不断变化着…… 说到这,真的要感谢大自然赋予人类如此精密的大脑。 为此,研究 人员开发了 HUSKY 控制框架 ,可以通 过全身控制,协调人形机器人保持平 衡;用 物理感知控制,让系统实时计算“滑板运动,接触力,摩擦,重心变化” 。
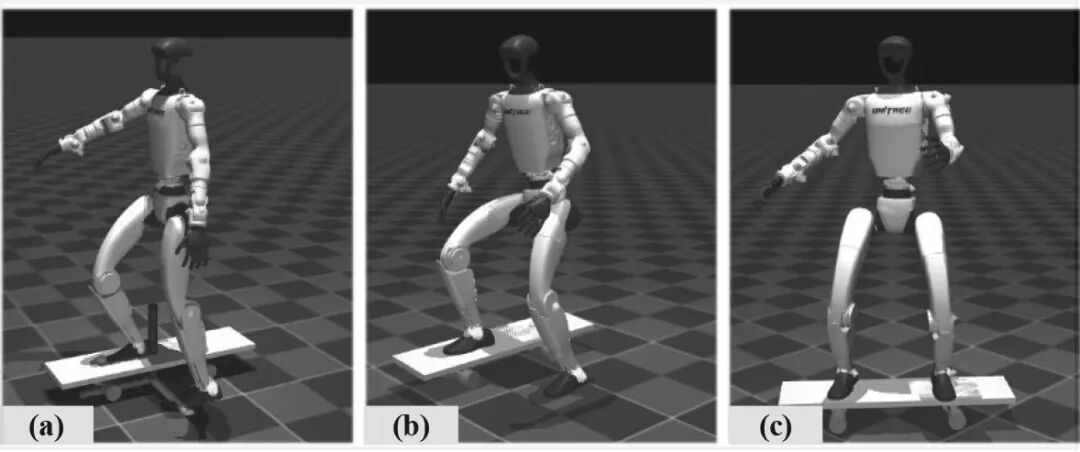
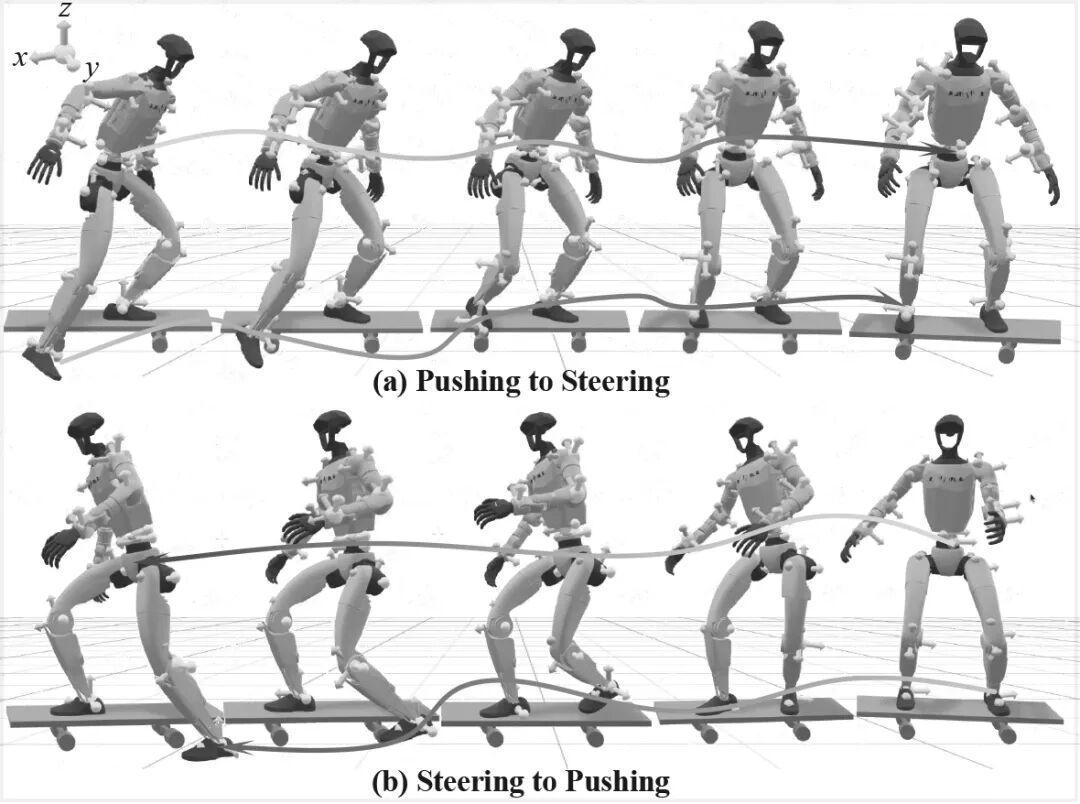
对于研究人员来说,他们并没有把 人形机器人和滑板分开看,而是视作一个整体。从某种意义上说,他们真正做到了“人板合一”。 上图展示了他们对于蹬板加速过程中的整体运动和腿部细节变化。 该图展示了 人形机器人和滑板之间的影响。 道理说起来很简单,蹬板的时候重心要跟上,不然会摔跤;滑行的时候失去平衡也会摔跤,而拐弯压得不够,无法转向,压多了也会失去平衡……
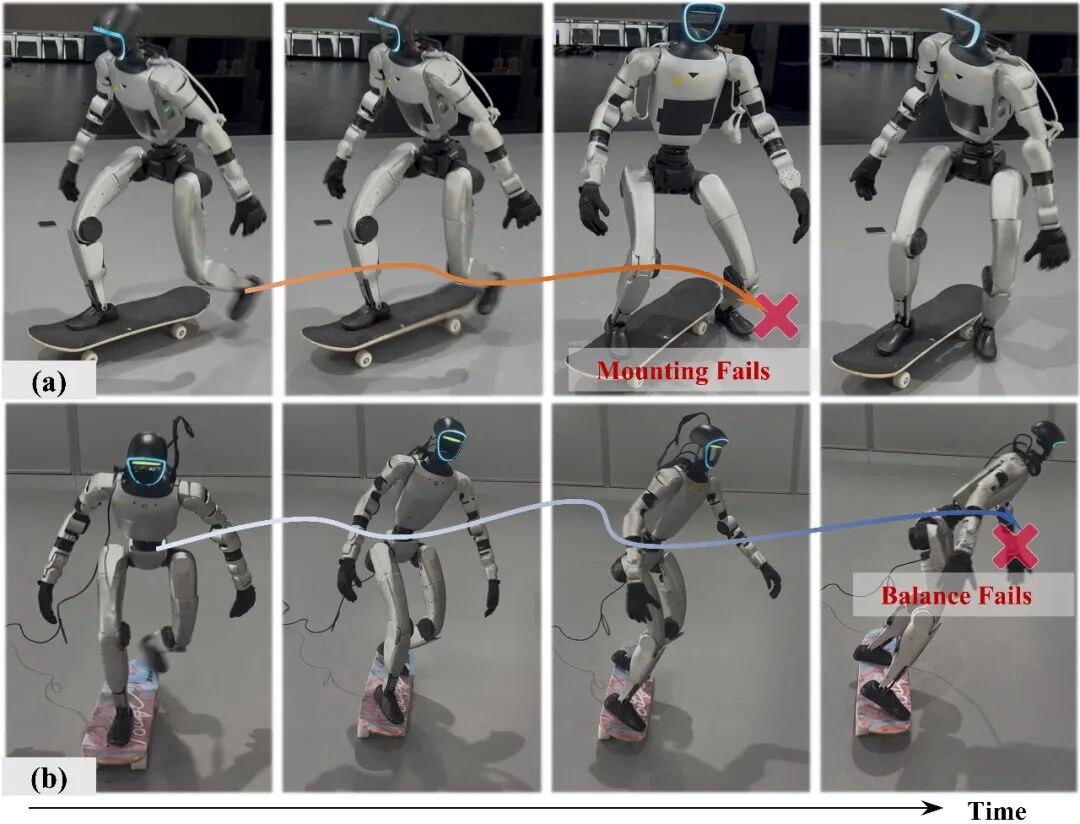
研究人员只能通过 最先进的算法和模拟器来处理这些复杂的动力学问题。 上面两张图是研究过程中, 人形机器人的“ 关键身体姿态参考”和多种滑板测试实验。 这篇论文的发表,包括开头的视频,其实都说明了目前研究取得了一 定进展。 目前 人形机器人可以:稳定站在滑板上,起步并蹬板持续滑行,并控制方向。
也许我们最终可能不会看到 人形机器人做出风格舒适的 kickflip,但这项研究会继续进行 下去。研 究人员会处理更多 极具挑战性的动力学问题,希望最终它能完美在不稳定的平台, 进行动态运动控制。这样就可以在类似灾害,复杂环境中提供有效帮助。




![小米真是哪个行业都想强饭吃,机器人也没落下[捂脸哭]](http://image.uczzd.cn/17267168200936134535.jpg?id=0)