宇树科技(Unitree)开源的 OmniXtreme 是一套专为高动态极限动作设计的人形机器人运动控制架构,核心是用流匹配(Flow Matching) 技术解决多动作泛化与物理落地难题,实现了从 “单一动作复现” 到 “通用高动态运动” 的突破。 技术背景与挑战
人形机器人在执行高动态动作,如后空翻、武术动作、街舞等时,面临两大核心挑战: 海量动作库的精准复现:传统方法在面对复杂且多样的动作库时,往往难以精准追踪和复现每一个动作,导致动作保真度下降。 物理环境中的实际落地稳定性:即使在仿真环境中能够完美复现动作,迁移到真实物理硬件上时,由于电机特性、摩擦力、能量反馈等物理因素的干扰,动作执行往往难以保持稳定。
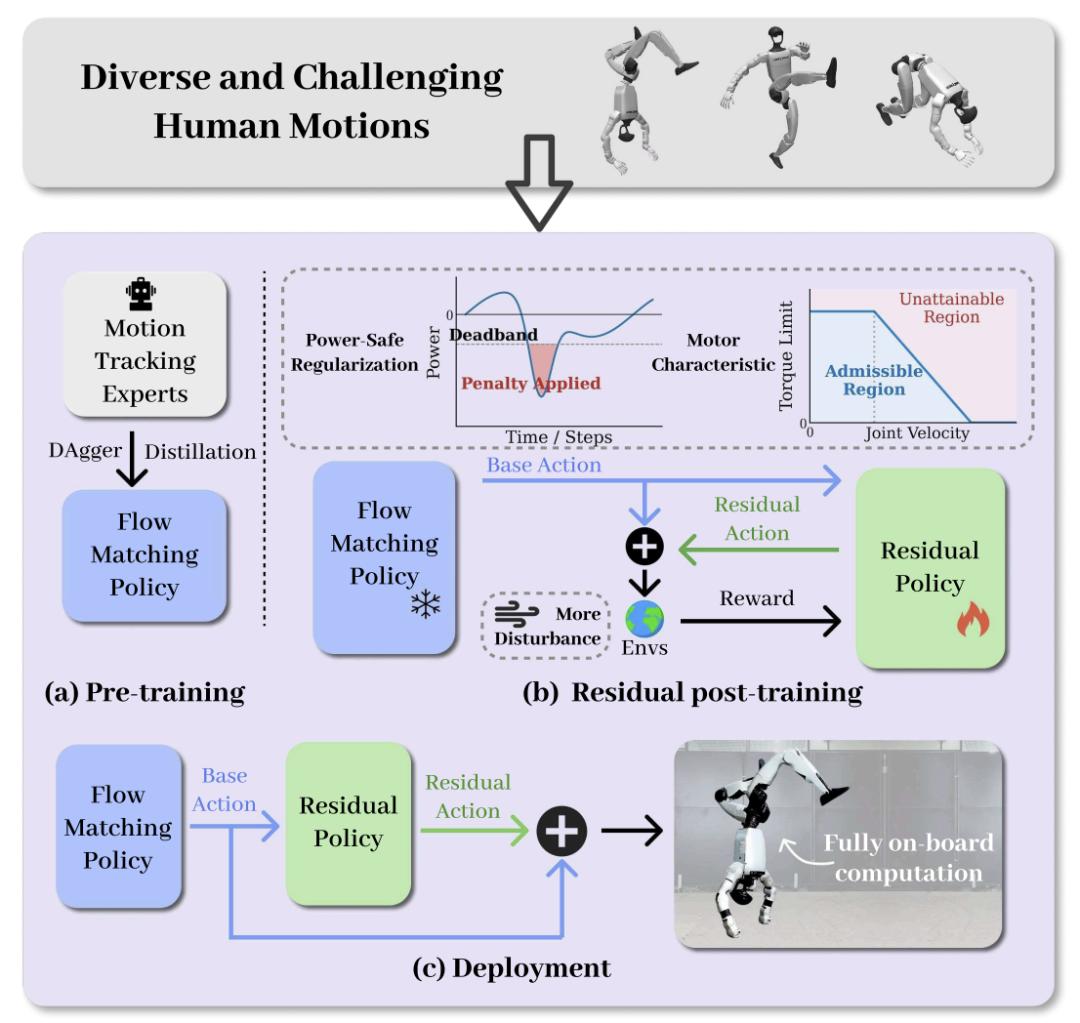
双阶段训练框架:
第一阶段:流匹配预训练(Scalable Flow-based Pretraining): 技术原理:通过构建速度场路径模型,将分散于不同专家策略中的高难度动作统一整合至生成式模型中。该技术有效避免了多任务强化学习过程中常见的梯度冲突问题,使机器人能够同时掌握多种复杂技能。 实现方式:利用生成式建模学习速度场路径,将随机噪声逐步导向专家动作,从而掌握从任意状态生成正确动作的泛化能力。 效果:成功整合了后空翻、武术、街舞等高动态技能,为机器人提供了丰富的动作表达基础。
第二阶段:执行器感知后训练(Actuation-Aware Post-Training): 技术原理:结合残差强化学习与电机物理特性建模,使机器人能够根据电机扭矩、转速等实时参数进行动态调整,确保动作执行既符合物理规律又保持高保真度。 实现方式:在冻结基策略后,训练一个轻量级的MLP残差策略,用于产生修正动作。基策略提供主要的行为指引,残差策略负责微调,共同生成最终的控制指令。
效果:显著提升了机器人在真实物理环境中的动作执行稳定性和保真度。 流匹配技术的核心优势: 高效整合异构动作:流匹配技术通过学习速度场路径,有效整合了来自不同专家策略的高动态动作,避免了传统方法中的梯度冲突问题。 提升动作保真度:通过构建速度场路径模型,流匹配技术能够更精准地复现参考动作,保持动作的高保真度。 增强物理稳定性:结合执行器感知后训练机制,流匹配技术使机器人能够根据电机物理特性进行动态调整,确保动作执行在物理环境中的稳定性。
推动技术迭代:OmniXtreme架构的开源为全球开发者提供了一个可复用的技术范式,加速了人形机器人运动控制领域的技术迭代。 促进产业化应用:通过公开核心算法与训练框架,宇树科技为行业探索复杂物理环境下的稳健控制提供了创新解决方案,推动了人形机器人技术的产业化应用。