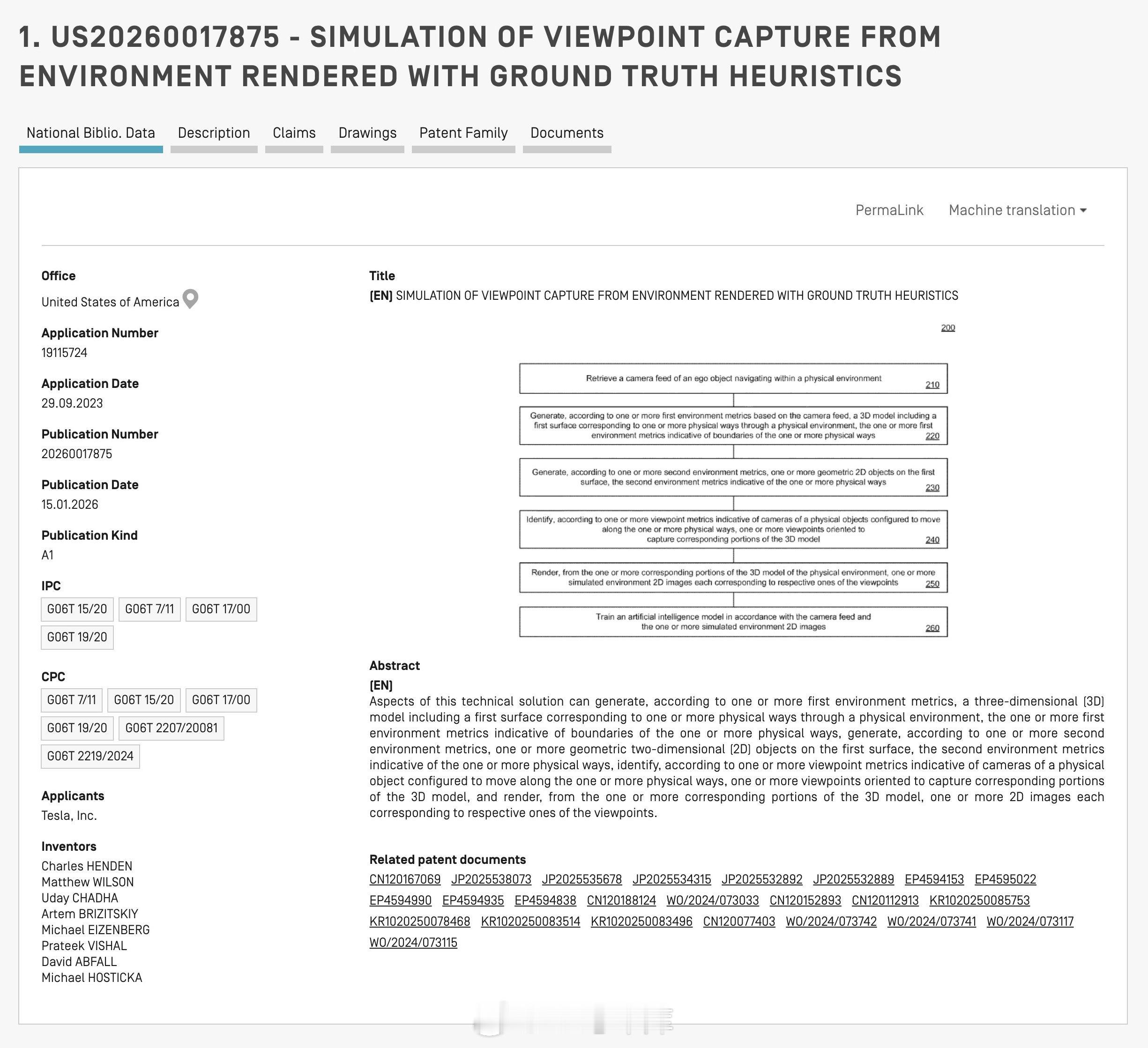
2026 年 1 月 15 日,Tesla 公布了专利 US20260017875A1《Ground Truth Heuristic Engine》,首次公开了他们如何把零散、普通的真实驾驶数据,转化为几乎无限的高保真训练场景,从根本上解决 AI 的「数据饥荒」问题。大家可以理解为特斯拉的世界模型。Tesla 不再只依赖车队采集的真实视频,而是在构建一个基于现实的「程序化矩阵世界」。一段普通的超市通勤路,可以被重混成上千种暴雨、雾霾、夜晚、突发事故的极端版本,而这些场景在现实中可能一辈子都遇不到几次。问题在于:现实世界既「太安全」,又「太局部」。加州晴天的 1000 万英里,教不会系统如何应对挪威暴雪或泰国乡村烂路。真正危险的「边缘案例」在现实中极其稀有,但 AI 必须看过无数次才能学会应对。Tesla 的方案是「混合现实引擎」:不是完全虚拟,也不是纯真实,而是在真实世界骨架上重建可控的虚拟环境。真实车辆(Ego Object)会先采集不可改变的物理信息:路面形状、路沿、坡度、拓扑结构。这些构成「第一环境指标」,确保模拟世界遵守真实物理规律。接着系统叠加「第二环境指标」:车道线、箭头、停止线等 2D 标记。因为它们与路面分离存储,Tesla 可以随意「重画」道路,比如把车道线褪色到 50%,测试系统是否还能识别。第三层是「熵指标」,也就是衰败与混乱:系统可以生成坑洼路面、破损标线、模糊边界,让 AI 适应现实世界的老旧与不完美。然后是「天气上帝模式」:晴天可一键变成暴雨夜、浓雾、逆光、积水反射、热浪扭曲等极端视觉环境。还有「国家切换」:模拟泰国的热带建筑、北欧的城市风格,让系统在不出国的情况下适应不同国家的视觉复杂度。最后是「幽灵交通」:系统会生成会乱变道的卡车、夜间横穿的行人、危险超车的车辆,让 AI 在虚拟世界中反复经历高风险事件。所有这些场景都由「虚拟摄像头」采集,位置与真实 Tesla 摄像头完全一致。因为世界是系统生成的,所以每一个像素都有完美标注,不再依赖人工打标签。这为 Tesla 的端到端基础模型提供了无限、高精度的训练数据,专门用来解决自动驾驶的「长尾问题」。对 Robotaxi 来说,可以提前模拟城市中每个上下车点的所有极端情况。对 Optimus 来说,同样的系统还能模拟工厂和家庭环境,让机器人在虚拟世界中先学会走路、避障和操作。特斯拉42mark