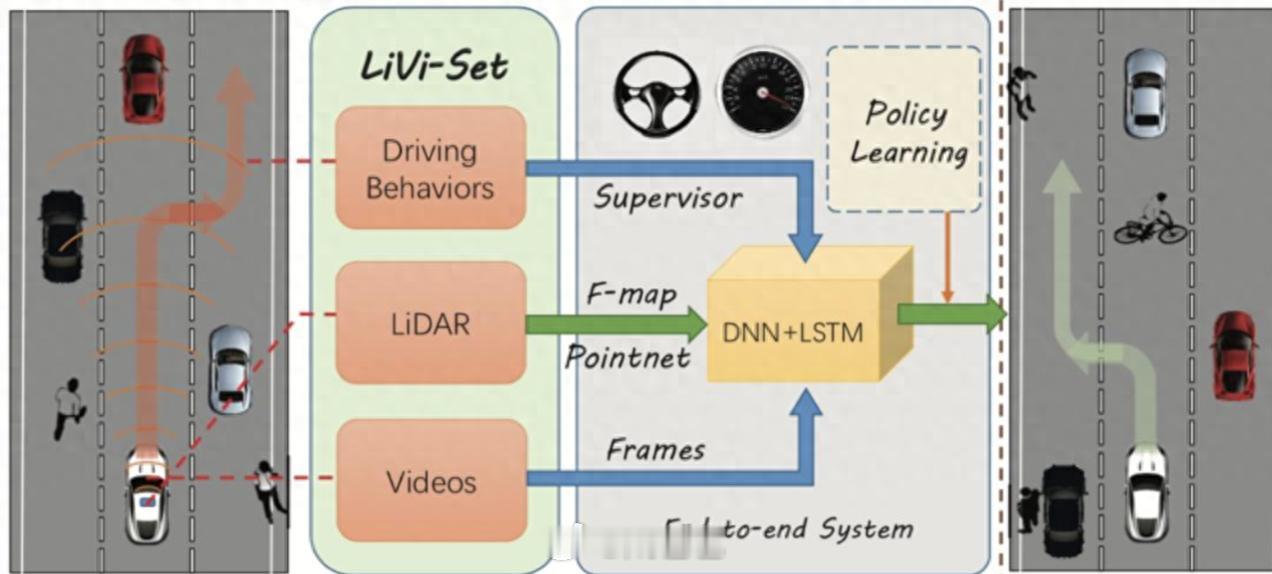
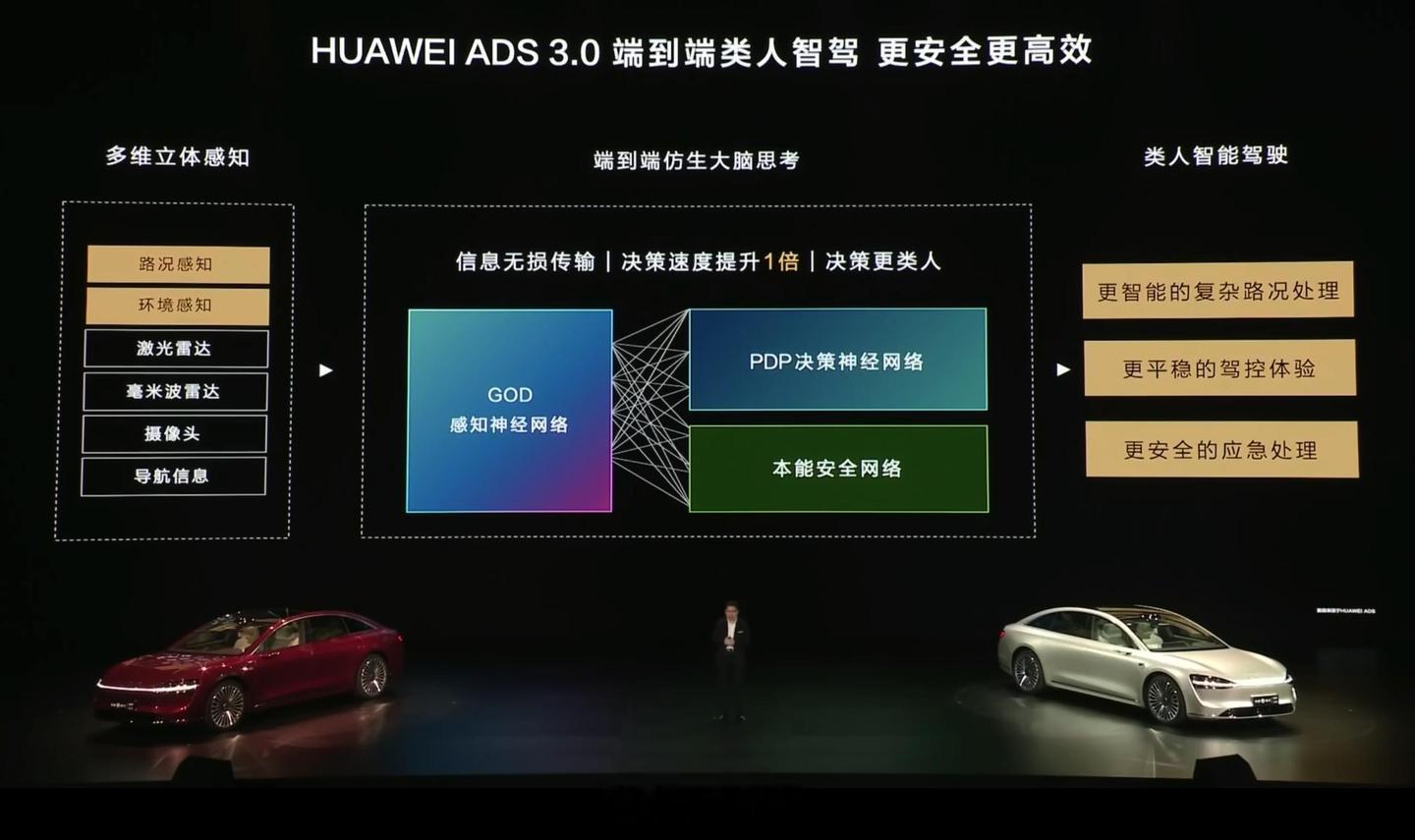
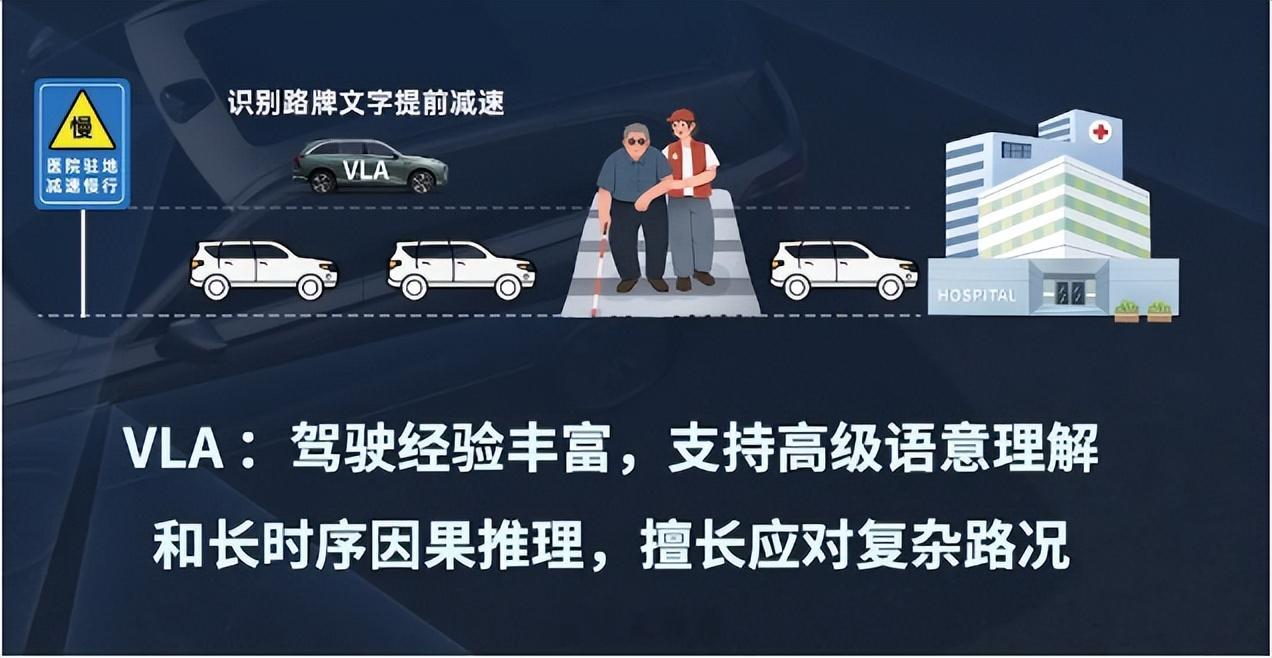
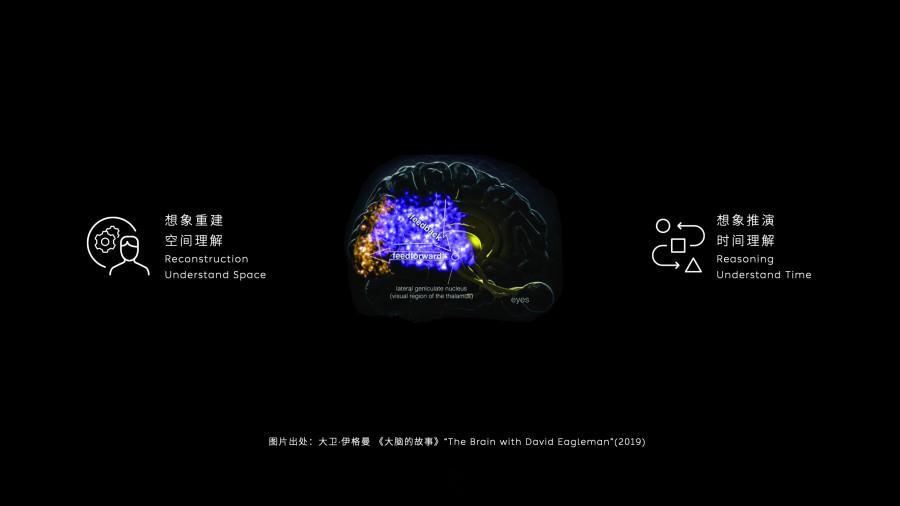
这两年新能源汽车发布会上各种技术名词层出不穷,消费者确实应接不暇,试着分板块和大家一起做下梳理,目的是搞清楚到底是全新技术 还是 营销包装,以及此刻到底给消费者能带来多大的益处。内容可能略长,不定期更新,补充。一、智能辅助驾驶:1.端到端(End to End,E2E)名词解读:本质上就是一种智能驾驶的算法模型,早期的的算法架构一般分为环境感知、决策规划、控制执行三个模块,端到端即将这三个流水线的模块融合在一起,像人类司机一样,直接“看”到路况,然后直接“动手”开车,中间不需要人工设计复杂的规则或分模块处理。带来的优势是:1)更高效的决策,避免信息传递过程中的数据损失,一个模型搞定所有步骤(感知+决策+控制)2)更接近人类司机的操作,同时需要靠大量真实驾驶数据训练。这里有一个很容易给消费者带来的误区就是并不是某款车型的智能辅助驾驶使用了端到端的算法模型就代表着其智能辅助驾驶的水平高,这需要车企进行大量的数据训练覆盖海量场景,并能够从中提取有效的高质量数据来应对复杂场景(如市区拥堵立交,狭窄道路鬼探头等),避免“翻车”。此外车企在使用端到端算法模型上也有不同的流派:模块化端到端:保留了人工设计的模块接口,人工能够单独补充和优化各个模块的数据/传输性能,而在信息传递中会有一定损耗,所以实际是一种“伪端到端”。一段式端到端:直接将传感器获取的数据映射为控制指令执行,减少信息传递的损耗,是真正的端到端,例如特斯拉FSDV12便是典型的一段式端到端。端到端模型一样存在弊端即在决策过程缺乏可解释性,在极端场景容易出现不可预测行为,我们称之为“黑箱特性”。2.VLA(Vision-Language-Action,即视觉-语言-动作模型)名词解读:实质上 VLA 可以理解为 端到端的进阶路线之一,VLA对比传统端到端,核心突破在于引入“思考”,传统端到端主要是“观察+行动”两个动作,而VLA由于加入Language语言模型,让决策推理可以被解释,让整套智驾逻辑更像人类“观察+思考+行动”的推理过程。如在缺乏红绿灯的环岛场景,VLA能生成多个步骤规划,而不是简单根据地图,传感器进行判断;在潮汐车道,VLA能结合视觉信号与文本指令判断车道的用通过性。相比传统端到端(VLM)仅能输出单步控制指令,VLA这种“多模态深度融合”的能力,在长尾场景中,能够展现更强的应对能力。因此,我们可以理解为,VLA就是为了解决传统端到端“黑箱特性+极端场景”而诞生的大模型,用来有效应对corner case(长尾场景)。3.WEWA/NWM(世界模型)名词解读:虽然各家命名不同,但其实我们可以通称为世界模型,实质上他也是传统端到端的另一条进阶路线,根本上是为了解决传统端到端模型“只会模仿、不会思考”的短板。举例而言传统端到端依赖高质量、大规模的真实驾驶数据去做行为学习,其本质上是在“模仿”,而非真正理解物理世界。通过大量的数据学习结果,其最终会成为一个“人类平均水平的司机”,同样的也会继承人类司机的驾驶行为缺陷。世界模型路线就是不再单纯依靠人类驾驶数据去“模仿”,而是用大模型构建一个“虚拟世界”,先理解环境中的物体(车、人、障碍物),预测它们的行为,再规划自己的路径。从而让算法真正理解驾驶环境、预测未来变化,甚至自主生成合理的行为链,靠融合深度学习与思维链推理框架。大世界模型带来的优势也十分明显:1.更从容应对城区、无图区域等复杂场景2.有预判风险并提前规划的能力,因此安全性更高。尽管目前尽管目前华为的WEWA,蔚来的NWM 世界模型已经落地,但无疑都还需要持续的数据驱动与云端AI芯片算力的加持,才能让世界模型逐步完善并发挥效果。总结一下:E2E,VLA,WEWA,NWM,并不是车型的卖点,现阶段更多的是车企在智能辅助驾驶领域推进的技术路线,目前也还没有优劣高下之分,对此刻消费者使用车辆的感知体验也并不强,大家切勿把这些名词简单的和智驾能力强弱划等号。